セックは、AI(人工知能)をIoTのキーテクノロジーと考え、研究開発に取り組んでいます。ロボットにも適用可能なエッジAIチップの開発、ロボットの知能処理の回路化、ロボット開発とAIを「つなぐ」プラットフォームの開発などのロボット分野から、機械学習による宇宙機の故障検知・予測などの宇宙分野まで、当社ならではのフィールドでAIの可能性を追求しています。
また、生成AI技術について、新しい開発スタイルを確立するための取組みを行っています。
超低電力エッジAIチップの開発と実用化、エッジAIチップを利用するためのソフトウェア開発環境の構築に、九州工業大学などと共同で取り組んでいます。
AI は社会の発展に不可欠な技術となった一方で、処理能力やエネルギー効率などの面で多くの課題を抱えています。これら課題の解決には、最新の脳科学・神経生理学の知見と、その応用を可能にするコンピュータ・計算機理論と、ハードウェアそのものの研究を一体化させて取り組む必要があります。
そこで、人の脳の仕組みを数式化した機械学習アルゴリズムのひとつであるレザバー計算モデルを実行する集積回路チップ(エッジ AI チップ)の開発に取り組んでいます。AI を搭載したエッジデバイスとしてロボットや IoT 分野に応用し、実用化に繋げるためのソフトウェア開発環境の構築にも取り組んでいます。
知能処理を回路化(FPGA化)し、回路化した知能処理をRTミドルウェア(RTM)のコンポーネントとして扱えるようにプラットフォーム化する研究を、九州工業大学生命体工学研究科 田向権教授と共同で進めています。
現在のAIの技術は、主に情報処理分野での研究により進展してきたものです。このため、AIの動作にはCPUやメモリなど大規模なコンピュータ資源を前提としており、AIをサービスロボットへ適用するにあたっては、ハードウェアの面で大きな課題があります。具体的には、AIの高速処理性能を維持したまま、AIが動作するプラットフォームの低消費電力化、低排熱化、小型化を進める必要があり、これを実現する方法として、知能処理の回路化(FPGA化)が現実解の一つとなります。また、この回路化した知能処理を、RTミドルウェア(RTM)のコンポーネントとして扱えるようにプラットフォーム化することで、ロボットへのAIの適用が容易になり、AIとロボットの融合が進んでいくことが見込まれます。本研究では、これら知能処理の回路化とロボットプラットフォームへの適用を目指しています。
- ACRiウェビナー(2022/7/26)にて「FPGAでのAI活用」について技術解説
- ACRiウェビナー(2022/3/15)にて「高位合成によるFPGA実装」について技術解説
- ソフトウェア技術者向けFPGA技術解説書「高位合成によるFPGA回路設計」を執筆(2022/2/28)
- ACRiウェビナー(2021/1/19)にて「オープンソースからの高位合成によるORB-SLAM FPGA実装」について講演
- 計測自動制御学会システムインテグレーション部門講演会(SI2019)(2019/12/12~14)にて「高位合成によるORB-SLAMのFPGA実装の最適化」について発表
- ロボティクス・メカトロニクス講演会2019(2019/6/5~8)にて「高位合成によるORB-SLAMのFPGA実装と評価」について発表
- ロボティクス・メカトロニクス講演会2018(2018/6/2~5)にてFPGAとRTミドルウェアの連携について発表
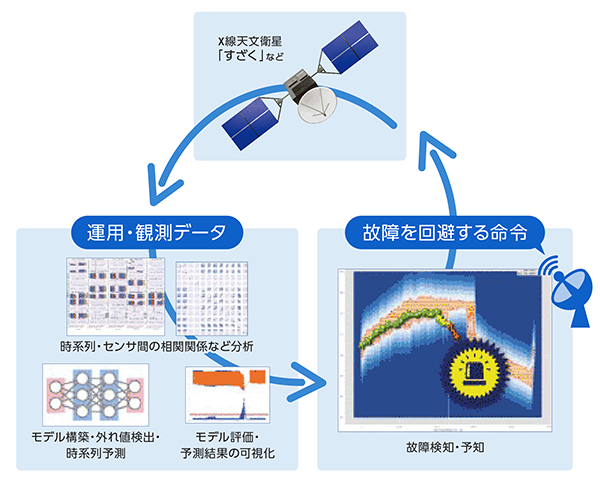
宇宙機の運用データにAIを適用して宇宙機の故障解析を行う研究をJAXA(国立研究開発法人宇宙航空研究開発機構)と共同で進めています。
AIの適用範囲のひとつとして注目されているのが故障解析の分野であり、AIによる様々な機器の故障解析が実用化されつつあります。このAIによる故障解析を宇宙機へ適用し、宇宙開発の安全性に寄与することが本研究の目的です。宇宙機は安全性、信頼性が厳しく問われ、未然に危険を予知し、事故防止に繋げる運用環境が望まれます。宇宙機の運用データにAIを適用して宇宙機の故障解析を行い、宇宙機の不具合を未然に検知する技術を蓄積し、安定した宇宙機運用に資するための研究を進めています。
ロボット開発と人工知能開発を融合するため、ロボット研究者にも人工知能研究者にも同じ土俵で容易に使える人工知能・機械学習プラットフォームの研究を、早稲田大学基幹理工学部表現工学科 尾形哲也教授と共同で進めています。
サービスロボットの活躍には、人工知能による高度化が必須です。昨今のサービスロボットのソフトウェア開発は、ロボット部品をコンポーネント化して組み上げることで、開発の効率化を進めています。その開発のプラットフォームには、RTミドルウェア (RTM) や Robot Operating System (ROS) などがありますが、誰もが使える汎用のプラットフォームにはなっていません。一方、人工知能(AI) の実世界への適用を考えた場合、ロボットはその現実的なフィールドであり、AIとロボットの融合が今後進んでいくものと考えられます。これらの点に着目し、ロボット研究者と人工知能研究者の双方が容易に使える統合開発環境の研究開発を進めています。
研究開発の成果は、統合開発環境「AirGraph(AI and Robot Graphical IDE)」として、GitHubに公開しています。
- 人工知能とロボットシステムの統合開発環境「AirGraph」
-
 AirGraph 紹介資料
(1,844KB)
AirGraph 紹介資料
(1,844KB)