RTMSafety(RTMセーフティ)は、ロボットの安全関連系への実装を想定し、機能安全の国際規格であるIEC 61508の認証を取得した世界初のロボット用ミドルウェアです。高い信頼性や安全性が要求されるロボットにおいて、開発コストの低減や、開発期間の短縮に貢献します。

■開発の背景
生活支援分野など人と共存するサービスロボットにおいては、安心・安全のために機能安全への対応が求められています。将来的には、サービスロボッ トは機能安全の国際標準規格(IEC 61508やISO 13482など)に準拠しなければ販売できなくなると考えられています。また、機能安全に対応したロボットの開発は、その開発プロセスが複雑で、開発の難易度も高いためコスト高にならざるを得ない状況です。サービスロボットが市場に普及するためには、ロボットの技術革新だけでなく、コストダウンも必要となります。
「RTMSafety」は、RTミドルウェアが備えているロボットのコンポーネント化技術により、ロボットの開発を効率化するとともに、機能安全のための機能を備えることで、上記の課題を解決し、安全認証されたロボット開発のコストダウンを実現します。
※「RTMSafety」は、独立行政法人新エネルギー・産業技術総合開発機構(NEDO)の委託事業「次世代ロボット 知能化技術開発プロジェクト」のもとで、独立行政法人産業技術総合研究所と共同研究した成果を活用しています。
■機能概要
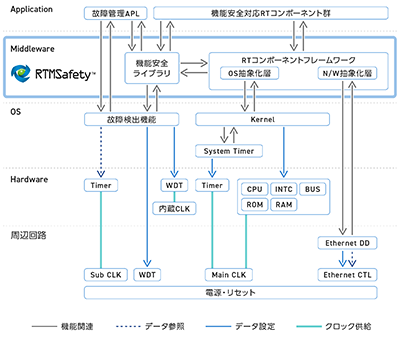
「RTMSafety」は、ロボット用コンポーネントを開発するためのRTコンポーネントのフレームワークと、OSが持つ故障検出機能やアプリケーションの生存監視機能を提供する機能安全ライブラリの大きく2つの機能で構成されています。RTコンポーネントフレームワークは、OSとネットワーク(N/W)を抽象化する層を備えており、ユーザはプラットフォームやネットワークを意識せずに、 RTコンポーネントを開発することが可能です。
※各機能の詳細は「RTMSafety」 ホワイトペーパーをご参照ください。
■適用事例
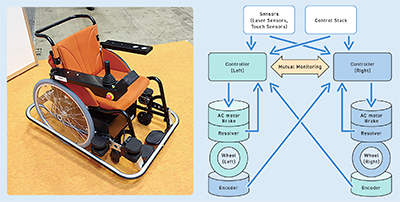
当社が開発した「RTMSafety」を適用して、独立行政法人産業技術総合研究所が機能安全に対応した車イスロボットの開発をおこないました。この車イスロボットは、機能安全を実現するために、左右の車輪ユニットが独立で制御可能な機構となっています。左右の車輪ユニットには、電源やCPUボードなどがそれぞれ実装されており、相互に生存監視を行い、どちらかが故障を検知した際には、安全に停止できる機能を備えています。
(資料提供:独立行政法人産業技術総合研究所)
■データシート
|
対応OS |
QNX Neutrino RTOS Safe Kernel 1.0 |
|---|
|
対応CPU |
X86シリーズ |
|---|
-
 RTMSafety IEC 61508合格証(2023年10月1日更新)
(234KB)
RTMSafety IEC 61508合格証(2023年10月1日更新)
(234KB)
-
RTMSafety製品概要
(753KB)
-
RTMSafetyホワイトペーパー
(773KB)
exida The Safety Automation Equipment List (SAEL)