


製造業の工場や物流倉庫、さらには農地や漁場まで。日本のあらゆる現場で、人手不足が深刻な問題となっています。自動化・ロボットによる代替の必要性が高まる一方で、現場への導入には「既製品では環境に合わない」「コストが見合わない」といった現実的な壁があるのも事実です。
セックが開発した屋内自律移動ロボットソフトウェア「Rtino(アルティノ)」は、既存のロボットや台車に“頭脳”を与えることで、自律移動を可能にするソフトウェアソリューションです。2016年、Y.MI.さんを含むわずか2名で始まった研究開発は、現在では多くのメーカーや現場で実運用を支える技術へと成長しています。
今回は、Rtinoプロジェクトを牽引する開発本部のY.MA.さんとY.MI.さんにインタビュー。物理学と生命工学という異なるバックグラウンドを持つ二人が、どのように現場の課題と向き合ってきたのか、そして一次産業を含む新たな可能性をどのように見据えているのか話を聞きました。
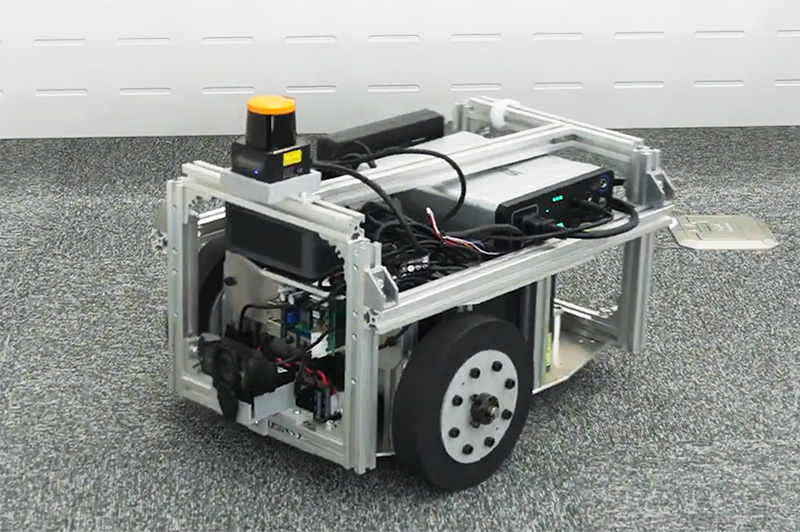
Rtinoを搭載したデモンストレーション用ロボット。移動台車での運搬から環境計測に監視、清掃まで、様々な業務を担うロボットに自律移動の機能を付与できる。
Y.MI. 開発本部第三開発ユニット プロジェクトマネジャー
Y.MA. 開発本部第三開発ユニット プロジェクトマネジャー

Y.MI.さん
スタートは2016年の社内研究開発でした。当時、工場の省人化ニーズが高まる一方で、「ハードウェアはあるが、ソフトウェアが分からず動かせない」と悩むお客様が多くいらっしゃいました。
そこで、車輪などの“足”※を持つロボットであれば、条件を整えることで自律移動させられる汎用的なソフトウェアを作ろうと考えたのが、「Rtino」の始まりです。最初は既存技術を動かすところからの手探りでしたが、展示会に出展すると、予想以上にお客様からの反響があったんです。
※本稿では、車輪やクローラーなど、ロボットが移動するための機構を相称して「足」と呼んでいます。

Y.MA.さん
Rtinoの特長は、ロボットそのものではなく、ミドルウェアとして提供している点にあります。お客様がすでにお持ちのロボットや台車、現場環境に合わせて適用できるため、新たにすべてを作り直す必要がありません。既存の資産を活かしながら“知能化”できる点が、多くのお客様に評価されています。


Y.MI.さん
カタログ上は高性能で価格も手頃なロボットは増えています。ただ、実際の現場はカタログ通りにはいきません。
例えば、工場のシャッターが開いて外光が差し込むだけで、LiDAR(レーダー光で対象物との距離や形状を測定する技術)が捉えていた環境が変わり、一般的なSLAM(自己位置推定と周辺環境の地図作成を同時に行う技術)では自己位置を見失って停止してしまうことがあります。
こうした現場特有の状況に対し、私たちはSLAMとライントレースなどを組み合わせた「ハイブリッド・ナビゲーション」で対応しています。環境が変わっても止まらずに動き続けられることが、現場では何より重要です。

Y.MA.さん
設備とのドッキングなど、高い精度で停止する必要がある場面では、「位置決め走行(Positioning Drive)」も有効です。ハードウェア任せでは難しい部分を、ソフトウェアで丁寧に制御します。
ロボットを導入したものの、環境に合わず十分に活用できなかったという話を伺うこともよくあります。だからこそ、「現場で実際に使えるようにする」我々のエンジニアリング力が必要とされているのだと感じています。

Y.MA.さん
今後、特に注力していきたい領域の一つが一次産業、いわゆる農業や漁業です。地方では人手不足が深刻で、将来を見据えると自動化のニーズは確実にあります。ただし、既存のロボット技術がそのまま使えるとは限りません。


Y.MI.さん
重要なのは、高機能であることが必ずしも正解ではないという点です。例えば、屋外の農地や養殖場では、最新のAIで高度な判断をするよりも、泥や水に強く、決まった作業を確実にこなすことが求められる場面が多くあります。
スイッチ一つで動き、壊れにくく、扱いやすい。そうしたシンプルさが現場では歓迎されることが多いのです。

Y.MA.さん
そうなんです。高機能なロボットを一台導入するよりも、機能を絞ったロボットを複数台使う方が現場の負担を減らせることもあります。いわば高級車より軽トラックの方が役に立つ、というイメージです。
「クラウド連携」だとか「AI活用」といった流行りの機能を盛り込みがちですが、本当にお客様が必要としている「適正な技術(Appropriate Technology)」を選び、提供することが、これからの地方や中小企業の課題解決には大切だと思っています。

Y.MA.さん
私は物理学科出身です。学生時代は宇宙線の研究をしていて、目に見えない粒子を観測する実験をしていました。セックに入社したのも「宇宙」というキーワードに惹かれたからなんですが、入社後は組み込みソフトウェアの開発にずっと携わってきました。

Y.MI.さん
私は生命工学で、微生物の検出技術を研究していました。二人ともプログラミングは入社してから本格的に学びましたが、セックには半年間の徹底した研修があり、そこで「コンピュータの気持ち」が分かるようになるまで鍛えられるんです。だからこそ、バックグラウンドに関係なく、論理的に考えられる、粘り強いエンジニアが育つのだと思います。

Y.MI.さん
社内には技術が好きで、真面目に取り組む人が多いですね。派手なアピールは苦手ですが、お客様の困りごとに対しては、泥臭く、技術で解決しようと食らいつく。それがセックの良さであり、Rtinoの信頼性につながっていると感じています。


Y.MA.さん
労働人口の減少は今後も続きます。工場内に限らず、屋外や公共空間での自律移動も一般的になっていくでしょう。
その中で我々がどう貢献するかですが、やはりハードウェアメーカーとの連携が鍵になります。我々はソフトウェアソリューションを提供する企業なので、どんなに素晴らしいソフトウェアを作っても、それを動かす「体」がなければ意味がありません。逆に言えば、良い「体」を持っているパートナーと組めれば、我々の「頭脳」でどんなことでも実現できる。このパートナーシップを広げていくことが、私のミッションだと思っています。

Y.MI.さん
技術的な挑戦はまだまだあります。現状の技術に満足せず、「動かないものを動かす」という難題に挑み続けたいですね。ハードウェアの制約や過酷な環境を、ソフトの力でどう乗り越えるか。そこにエンジニアとしての面白さと、セックの存在意義があると思います。
派手な機能を詰め込むのではなく、現場が本当に求めている解決策を丁寧に形にする。今回のインタビューから見えてきたのは、技術と真摯に向き合い、現場に寄り添うセックの姿勢でした。
「同じ方向を向いた仲間を集めるほうが、組織としては強い」。Y.MA.さんの言葉からは、物理学と生命工学という全く異なるバックグラウンドを持つ二人が、ビジョンを共有することで、共にプロジェクトを推進してきた自信と信頼関係が伺えます。
人手不足という日本の社会課題に対し、セックの「現場力」と「技術力」がどのような答えを出していくのか。Rtinoの進化から、今後も目が離せません。

(取材・文/セック・広報担当)


















Rtino(アルティノ)は、ロボットの自律移動に必要な地図の自動作成機能を有した屋内自律移動ロボットソフトウェアです。オフィスや工場などのフロア内で、移動台車などを「Rtino」を使用して動作させることで、移動台車にフロア内の地図自動作成機能と自律移動機能を付加することが可能です。環境計測や監視、運搬、清掃などの業務を担う自律移動ロボットに適用できます。