セックは2003年から、他のソフトウェア会社に先行してロボット用ソフトウェアの研究開発を開始し、ロボット用ソフトウェアの知見と実績を積み重ねてきました。今、ロボットというハードウェアの価値をソフトウェア技術で高めるために、システム工学の専門家としての当社の技術が求められています。長年培ってきたロボット用ソフトウェアの標準化技術をベースに、研究開発の成果とエンジニアリング力で、社会課題の解決に取り組んでいます。
標準化技術
ロボット開発のフレームワークとして世界的に普及しているROS(Robot Operating System)、ロボットのコンポーネント化に優れた共通プラットフォームであるRTミドルウェア。セックはこの二つの標準化技術に加え、国際標準規格IEC 61508に準拠した機能安全技術を有しています。高い信頼性と安全性を備えたロボットの、開発コストの低減と開発期間短縮のニーズに応えます。
リアルタイム技術
人が介在することなく動作するロボットは、その周囲で生じている事象を様々なセンサーで入力し、自律的に動作することが求められます。いつ、何が、どのタイミングで生じるか、予め予測することができない入力に対して瞬時に応答し、連続動作可能なロボットを設計・開発することのできる技術が、セックの最大の特徴であるリアルタイム技術です。
システムズエンジニアリング
「そこそこ動く」から「ちゃんと動く」へ。ハードウェアとソフトウェアだけでなく、ロボットに関わる人との関係性を適切に定義し、AIやセンシング技術など様々な要素技術を組み合わせ、ロボットシステムとして統合することが重要です。ここで求められるのは、Systems Engieergin Consultantsである、セックのシステムズエンジニアリング力です。
ロボットのソフトウェアをモジュール化し、用途に応じて柔軟に組み合わせることができる開発基盤の整備をテーマに、当社は「工場内搬送用リファレンスロボットシステム」と「運用支援ツール」の研究開発に取り組んでいます。中小規模の工場や倉庫では、内製AGVや人手による搬送が一般的であり、既存の業務システムとの連携も限定的です。こうした現場にも柔軟に適用できるソフトウェアモジュール群と、それを効率的に運用するための支援ツールを開発します。ROS2やNode-REDに準拠した設計で、ノーコード設定ツールや遠隔監視 UI、自動検証に対応したモジュール構成を整備し、ロボットの導入現場での運用負荷を軽減し、実用化と普及を目指します。
「人」と「サイバー・フィジカル空間」が融合した「HCPS(Human-Cyber-Physical Space)融合人協調ロボティクス」という新領域の技術開発・社会実装を推進することで、人とテクノロジーが共生・協調して相互に支えあう社会(テクノピアサポート社会)を実現することを目指しています。
HCPS 融合人協調ロボティクスの基盤技術を活用し、人々が日常多くの時間を過ごしている住宅やビル(集合住宅、オフィスビル等)、商業施設、病院等を対象とした HCPS 融合人協調ロボティクスの社会実装に取り組みます。HCPS 融合人協調ロボティクスの導入促進ツールの整備やロボットフレンドリーな環境の構築を推進し、労働人口減少対策、高齢者・障がい者の生活の質向上、子育て世代の可処分時間の延伸などへの貢献を目指します。
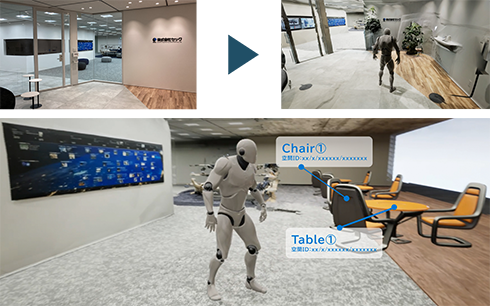
ロボットの動作環境をデジタルツインとして構築し、現実世界のロボットとデジタルツインとで相互に情報を共有することで、シームレスな動作環境を実現する。
人の脳の仕組みを数式化した機械学習アルゴリズムのひとつであるリザバーコンピューティングを実行する集積回路チップ(エッジ AI チップ)を開発し、AI を搭載したエッジデバイスとしてロボットや IoT 分野に応用し、実用化を目指します。また、本プロジェクトの成果となるエッジ AI チップを実用化に繋げるために、ソフトウェア開発環境の構築にも取り組んでいます。
知能処理を回路化(FPGA化)し、回路化した知能処理をRTミドルウェア(RTM)のコンポーネントとして扱えるようにプラットフォーム化する研究を九州工業大学と共同で進めています。
安心安全で信頼性が高く、より付加価値の高いロボットソフトウェアを開発するためには、ソフトウェアとあわせてハードウェアに関する知見も必要です。ロボット開発技術探求プロジェクトは、当社のロボット開発技術の深化を目的とした研究開発プロジェクトで、ロボット競技エンジニア選手権CoRE(The Championship of Robotics Engineers) 1部リーグでの優勝を目標のひとつとして「SETAGAYA Eclipse」のチーム名で活動しています。

研究開発の成果を元に、試作機から実用機まで、ロボットソフトウェアの開発に対応しています。
- ロボット標準化技術(RTミドルウェア/ROS)を適用した開発
- 車両自動走行、無人搬送車、業務用掃除機、建築機械、農業機械、船舶、ドローンなどの個別ソフトウェア開発
- ロボットシミュレーション、SLAM技術、音声処理、画像処理、AI(人工知能)などの要素技術を活用した開発
- コミュニケーション(受付、翻訳、通訳など)ロボット、見守り&パーソナルヘルスケアなどの利活用サービスに関する開発
「Rtino」(アルティノ)は、ロボットの自律移動に必要な地図の自動作成機能を有した屋内自律移動ロボットソフトウェアです。オフィスや工場などのフロア内で、移動台車などを「Rtino」を使用して動作させることで、移動台車にフロア内の地図自動作成機能と自律移動機能を付加することが可能です。環境計測や監視、運搬、清掃などの業務を担う自律移動ロボットに適用できます。

「Rtrilo」(アールトリロ)は、ディープラーニング技術や各種画像処理を組み合わせて、カメラからの動画・静止画より特定の物体や領域を抽出し、高度なロボットの制御を可能にするコンピュータビジョンソフトウェアです。ロボットはもちろん、自律移動台車など様々な機器に「眼」の機能を付与します。

「RTakt」(アールタクト)は、様々な種類の自律移動型ロボットを一括管理するためのソフトウェアです。飲食店や工場などで稼働する自律移動型ロボットを、「RTakt」を使用して動作させることで、配膳ロボットであっても、運搬ロボットであっても、同じ操作方法で運用できるようになります。異なる場所にいるロボットをリモートで操作・監視することも可能です。「RTakt」はロボットが人と共に働く環境を実現します。

「RTMSafety」は、ロボットの安全関連系への実装を想定し、機能安全の国際規格であるIEC 61508の認証を取得した世界初のロボット用ミドルウェアです。RTミドルウェアのコンポーネント化技術により、ロボットの開発を効率化するとともに、機能安全のための機能を備えることで、安全認証されたロボット開発のコストダウンを目指しています。

- [早稲田大学共同研究] ロボットとAI(人工知能)をつなぐプラットフォームの研究(2016年~)
ロボット開発と人工知能開発を融合するため、ロボット研究者にも人工知能研究者にも同じ土俵で容易に使える人工知能・機械学習プラットフォームのを早稲田大学と共同で開発しました。研究開発の成果は、統合開発環境「AirGraph(AI and Robot Graphical IDE)」として、GitHubに公開しています。 - [NEDO] ロボット活用型市場化適用技術開発プロジェクト(2017年~2020年)
- [経済産業省] ロボット介護機器開発・導入促進事業(基準策定・評価事業)(2013年~2015年)
- [経済産業省] 次世代ロボット知能化技術開発プロジェクト(2007年~2012年)
- ロボット知能ソフトウェアプラットフォームの研究開発
- 移動知能(サービス産業分野)の研究開発 - [NEDO] 基盤ロボット技術活用型オープンイノベーション促進プロジェクト(2009年~2011年)
- [NEDO] 次世代ロボット共通基盤開発プロジェクト(2005年~2008年)
- 画像認識用デバイス及びモジュールの開発
- 国立研究開発法人 産業技術総合研究所(AIST)
- 国立研究開発法人 宇宙航空研究開発機構(JAXA)
- 九州工業大学
- 早稲田大学