
社会全体のデジタルトランスフォーメーション(DX)が加速する中、あらゆる産業においてAI(人工知能)の導入が進んでいます。その一方で、「実社会の現場で使い続けること」の難しさに直面するケースも少なくありません。
特に画像認識の技術は、ディープラーニング(深層学習)の劇的な進化により私たちの生活に身近なものとなりましたが、いざ実社会の「現場」に導入しようとすると、思いもよらない壁に直面することが少なくありません。クリーンなデータで学習したAIモデルは、理想的な環境下では驚くべき精度を発揮します。しかし、屋外の建設現場や高速道路の駐車場、稼働中の工場といった実際の環境は、常に変化と不確実性に満ちています。突然の雨や霧、強烈な西日、レンズの汚れ、予期せぬ障害物の映り込み ─ 現場にあふれるこうした「ノイズ」は、AIの判断を容易に迷わせてしまいます。
システムが高度化する一方で、最終的に現場の安全や効率を担保するためには、こうした過酷な環境下でも安定して動作する信頼性が不可欠です。私たちセックが開発・提供しているコンピュータビジョンソフトウェア「Rtrilo(アールトリロ)」は、こうした「現場の不確実性」に正面から向き合う中で生まれ、進化してきました。開発チームが長年どのような思いで技術と向き合い、社会インフラの課題解決に取り組んできたのか、その軌跡と今後の展望を通じてお伝えします。

Rtriloの開発プロジェクトは、昨今のAIブームに乗ってスタートしたものではありません。その歩みは、今から10年ほど前にさかのぼります。
私たちセックは、宇宙機やモバイルネットワークなど、高い信頼性が求められる分野でのリアルタイムソフトウェアの開発を事業の柱としてきました。近年、ロボット用ソフトウェアの開発が増える中で、自律移動型のロボットを制御する「足回り」の技術を培ってきましたが、ロボットが人の手を介さずに自律的に活動するためには、足だけでなく、周囲の状況を正確に把握するための「眼」が必要です。ロボットテクノロジーの「RT」と、地球上で最初に視覚を獲得したとされるカンブリア紀生物の代表格・三葉虫(Trilobites)に由来する「Trilo」を組み合わせ、「Rtrilo」という名前にその思いを込めました。
2010年代前半、ディープラーニング技術は大きな進展を遂げ、私たちは、JAXA(宇宙航空研究開発機構)との共同研究などを通じてその可能性を実際に目の当たりにしました。しかし、現場で使える技術にするための道のりは平坦ではありませんでした。
私たちは、認識の精度を上げるために、単純にAIのモデルを大きくしたり、学習データを増やしたりする方法だけに依存することは避けました。AIは未知のパターンに弱いという特性があるため、現場の悪天候や照明の変化といったノイズをすべてAIだけで処理しようとすると、システム全体の安定性を損なうおそれがあるからです。
そこで開発チームがたどり着いたのが、「AIだけに頼らない」というハイブリッドなアプローチです。独自のアルゴリズムによってノイズを取り除いたり、AIの判定をアルゴリズムで補正したりする仕組みを構築しました。この泥臭くも確実な技術の組み合わせにより、環境変化にも認識精度が崩れにくい、ロバスト性(堅牢性)の高いシステムを実現しました。
このRtriloの技術が、現在、社会インフラの現場でどのように活用されているのか。その代表的な例が、駐車場監視クラウドサービス「Rtrilo Parking Monitor(アールトリロ パーキング モニター)」です。
物流業界の「2024年問題」により、トラックドライバーが適切な休息を取れる休憩スペースの確保は社会的な課題です。特に高速道路の駐車場では、空き状況が分からないことがドライバーの負担を生んでいました。従来のセンサーを埋め込む手法は工事やメンテナンスに多額の費用がかかりますが、私たちはカメラ映像を解析することでこの課題を解決しました。
- 俯瞰カメラ1台で広範囲を判定
車両を1台ずつ認識するのではなく、AIと専用アルゴリズムを組み合わせて駐車場全体の「見た目(満空状況)」を判定します(特許第 7458812号)。 - 駐車区画ごとの滞在時間を可視化
特定の駐車マスへの滞在時間を把握し、ドライバーへ共有します。2026年1月からは山口県の壇之浦パーキングエリアで実運用が開始されました。
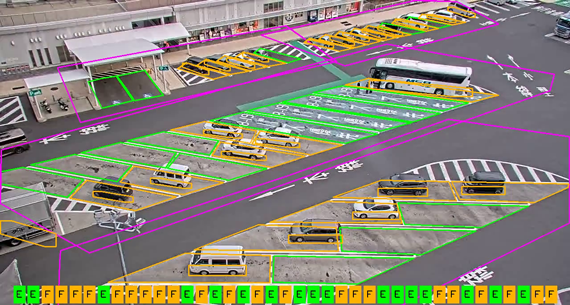
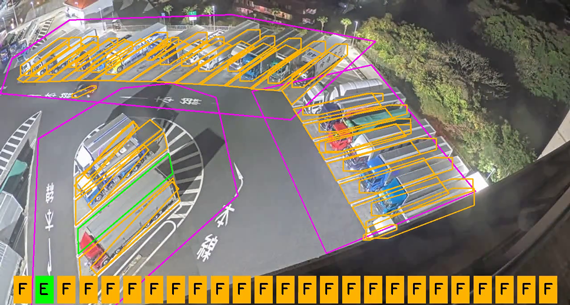
壇之浦パーキングエリア(山口県)では、工事の影響で混雑が予想されていたことから、「Rtrilo Parking Monitor」が導入されました。複数台の俯瞰カメラの映像から、90台以上の駐車スペースを同時にモニタリングし、取得した駐車区画ごとの空き状況を本線走行中のドライバーにリアルタイムに提供することで、パーキングエリアのスムーズな利用を支援しました。
高速道路のメンテナンス工事における作業員の安全確保のため、規制材による監視エリアを自動認識し、車両の侵入を検知してアラート通知する仕組み(特許第 7209785号)も開発しました。現場のリアルな困りごとに耳を傾けることで生まれた技術です。

画像認識をはじめとするAI技術は、今後さらに社会に溶け込んでいくでしょう。しかし、私たちが目指しているのは単に最先端を追求することではなく、物理空間とサイバー空間をつなぐ「眼」として、現場で本当に機能するシステムを着実に作り上げていくことです。
インフラを支える技術には、一過性のブームではなく、息長くシステムを維持・発展させていく責任が伴います。私たちが50年以上培ってきたリアルタイム技術やエンジニアリングの力を基盤に、これからもパートナー企業の皆様と共に、現場で本当に「使い続けられる」技術を社会に提供してまいります。

Rtrilo(アールトリロ)は、ディープラーニング技術や各種画像処理を組み合わせて、カメラからの動画・静止画より特定の物体や領域を抽出し、高度なロボットの制御を可能にするコンピュータビジョンソフトウェアです。ロボットはもちろん、自律移動台車など様々な機器に「眼」の機能を付与します。

Rtrilo Parking Monitor(アールトリロ パーキング モニター)は、カメラ映像にAIを活用し、駐車場の状況をリアルタイムに把握できる駐車場状況判断サービスです。駐車場全体の混雑度を即時に可視化する「混雑状況判断サービス」と、各駐車区画の空き状況を検知する「駐車区画監視サービス」の2つの機能を提供します。