SEC began research and development of software for robots in 2003, before other software companies, and has accumulated knowledge and experience in software for robots. Today, our technology as a systems engineering expert is required to enhance the value of robot hardware with software technology. With the standardization technology for robot software, which we have cultivated over the years, as a base, we are working to solve social issues with the results of research and development and our engineering expertise.
Standardization technology
The Robot Operating System (ROS) is popular worldwide as a framework for robot development, and RT-middleware is a common platform that is excellent for robot componentization. In addition to these two standardized technologies, SEC has functional safety technologies compliant with the international standard IEC 61508. These technologies enable us to meet the need to reduce development costs and shorten development timelines for robots that require a high degree of reliability and safety.
Real-time technology
Robots that operate without human intervention must operate autonomously through various sensor inputs from events occurring around them. The key feature of SEC is real-time technology, which enables the design and development of robots capable of continuous operation by responding instantly to inputs whose occurrence time, content, and timing cannot be predicted in advance.
Systems engineering
Moving from "somewhat functional" to "fully operational." Beyond hardware and software, it is crucial to appropriately define relationships with people involved in robotics and integrate various elemental technologies, such as AI and sensing technology, into a cohesive robotic system. What is required here is the systems engineering capability of SEC, Systems Engineering Consultants.
Under the theme of establishing a development platform that allows modularization of robot software and flexible combination of software in accordance with application, we are engaged in research and development of a reference robot system for internal plant transport and operation support tools. In small- and medium-scale plants and warehouses, in-house AGVs and manual transport are common, and integration with existing business systems is limited. We aim to develop a set of flexible software modules and supporting tools applicable to such environments. By designing in compliance with ROS2 and Node-RED, we will implement modular configurations that support no-code configuration tools, remote monitoring UIs, and automatic verification. This approach is intended to reduce operational burdens at robot deployment sites and promote practical adoption and widespread use of robots.
"Human-cyber-physical space (HCPS) integrated human collaborative robotics" is the name of a new field that fuses people with cyber-physical spaces. We aim to promote technology development and implementation in society to realize a world in which people and technology can exist together, collaborate, and support each other (a technopia support society).
We will use the fundamental technology from the field of HCPS integrated human collaborative robotics and implement it in multiple areas of society where people spend a large amount of time on a regular basis, such as homes, buildings (apartment houses and offices), commercial facilities, and hospitals. In addition, we aim to build tools for promoting the introduction of HCPS integrated human collaborative robotics, as well as to encourage the construction of a robot-friendly environment, thereby contributing toward efforts to tackle the decrease in the working population, improve the quality of life of elderly and disabled people, and increase the disposable time of people with young children.
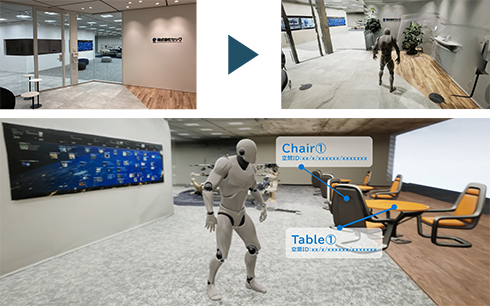
The robot's operating environment will be built as a digital twin, and information will be mutually shared between the robot in the real world and the digital twin to achieve a seamless operating environment.
We are working to develop an edge AI chip with an integrated circuit that can run models based on reservoir computing—a type of machine learning algorithm that expresses the mechanisms of the human brain as formulas. Our aim is to utilize these chips and realize real-world implementation with AI-powered edge devices in the fields of robotics and IoT. We are also building a software development environment to help realize the ultimate goal of this project—implementing edge AI chips.
Together with the Kyushu Institute of Technology, we are conducting joint research into the circuitization of intelligent processing—incorporating field-programmable gate arrays (FPGA)—and into turning this circuitized intelligent processing into a platform that can be manipulated as a component of RT-Middleware (RTM).
To develop robot software that is safe, reliable, and offers higher added value, it is also necessary to have knowledge about hardware alongside software. The robot development technology exploration project is a research and development initiative aimed at deepening our robotics development technology, and the team participates under the name “SETAGAYA Eclipse,” with one of its goals being to win first place in the first division league of the Championship of Robotics Engineers (CoRE) competition.

Based on the results of our research and development, we are capable of developing robot software from prototypes to practical models.
- Development using robot standardization technologies (RT-Middleware/ROS)
- Individual software development for automated driving, automated guided vehicles (AGV), marine vessels, drones, industrial vacuums, agricultural machinery, etc.
- Development using elemental technologies such as robot simulation, SLAM technologies, speech processing, image processing, artificial intelligence (AI), etc.
- Development for communication robots (reception, translation, interpreting, etc.) and services that use them (monitoring support, personal healthcare, etc.)
Rtino is indoor autonomous mobile robot software capable of generating maps required for the autonomous movement of robots. It enables automated map generation functions and autonomous movement functions to be added to mobile carts and other vehicles operating in offices, plants, and other indoor floor spaces. Rtino can also be equipped to autonomous mobile robots responsible for environment measuring and monitoring, transportation, and cleaning.

Rtrilo is computer vision software that combines deep learning technologies with various types of image processing technologies. Capable of identifying specific objects and areas from both videos and stills, it enables high-level control of robots. The software provides robots and various other machines such as autonomous carts with the functions of “sight.”

RTMSafety, developed with the intention of being implemented in robot safety-related systems, is the world's first middleware for robots certified under IEC 61508, an international standard for functional safety. By leveraging the componentization technology of RT-middleware to streamline robot development and by incorporating functional safety features, RTMSafety aims to reduce the cost of developing safety-certified robots.

- National Institute of Advanced Industrial Science and Technology (AIST)
- Japan Aerospace Exploration Agency (JAXA)
- Kyushu Institute of Technology
- Waseda University