Rtrilo is computer vision software that combines deep learning technologies with various types of image processing technologies. Capable of identifying specific objects and areas from both videos and stills, it enables high-level control of robots. The software provides robots and various other machines such as autonomous carts with the functions of “sight.”

“Computer vision” refers to technology that identifies objects in videos and still images, thereby providing computers with visual functions. Rtrilo combines image processing and deep learning technologies to detect and identify specific objects—tasks that had proven difficult for existing image processing software. In addition, the software leverages unique image processing technologies to provide situational awareness that can be applied to a variety of different scenarios.
■ Usage scenarios
Rtrilo can be equipped to robots and various other machines to detect specific objects and obstacles, identify no-entry areas, and grasp the surrounding environment. In this way, the software provides machines with the functions of “sight.” It can be used in the following scenarios.
Detecting travel routes and obstacles
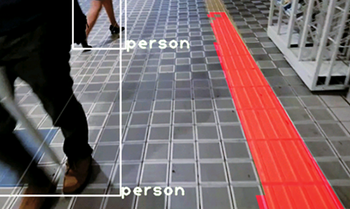
Rtrilo detects no-entry areas and travel routes—which distance sensors and other devices find it hard to differentiate between— in real time, enabling robots to travel flexibly and autonomously.
Recognition of specific objects
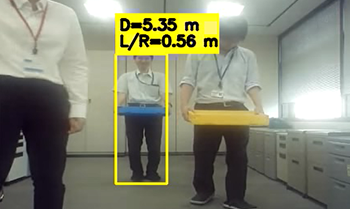
Rtrilo is capable of remotely recognizing objects with specified colors and shapes, and enabling robot movements to be controlled accordingly. In the image, Rtrilo is tracking the human holding the blue case.
Identifying how to grip different objects

By incorporating deep learning models that have been learned via unique methods, Rtrilo can identify how to grip different tableware, and differentiate between agricultural grains and weeds.
Reading seven-segment displays

Rtrilo is able to recognize a variety of information, such as warning lamps and seven-segment displays, in camera images, and send real-time alerts to managers or other destinations. This is useful for existing devices that, due to various constraints, cannot easily be connected to IoT.
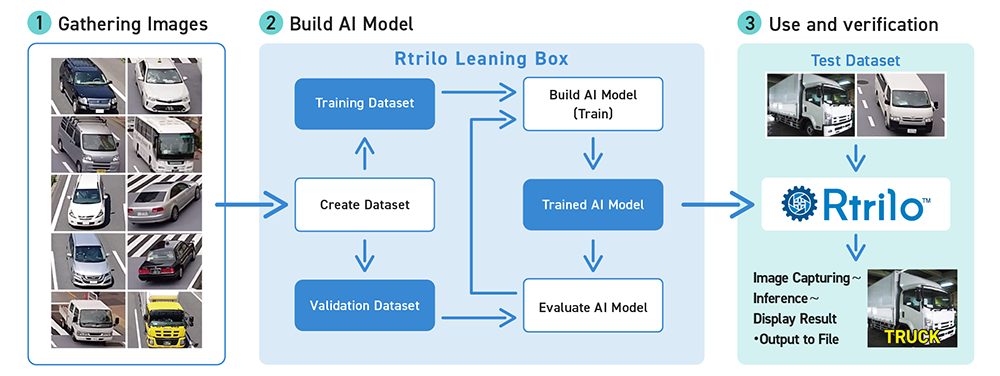
The construction of deep learning models for specific object detection and image classification requires a variety of processes, including complex pre-processing, defining of deep learning models, adjustment of learning parameters, and performance evaluation. Rtrilo Learning Box is equipped with the functions required to construct such models and so enables customers to easily construct deep learning models themselves.
■ Types of deep learning models that can be constructed
- Image classification: the ability to differentiate between what is being shown in various images
- Object recognition: the ability to detect different objects in an image, and differentiate between them
■ Pre-processing
- Data Annotations (create a labeled dataset)
- Data splitting (train, validation, and test)
- Image amplification (noise, cropping, color changes, blurring, contrast changes, rotation, geometric changes, etc.)
■ Learning
- After various parameters have been specified, including the model to be applied, imbalance corrections, learning cycles, feature scaling, etc., learning programs can be executed with a single command line.
- Loss functions, optimization algorithms, learning rates, and other learning methods can be freely adjusted, and unique network models can be constructed.
■ Evaluation
- Output learning curves, various indices (precision and recall ratios, f-scores), and confusion matrices
- Output erroneously judged images
Rtrilo Parking Monitor is a parking lot status monitoring service using camera images and AI. It provides two types of services: a Congestion Monitoring Service, which instantly visualizes overall congestion across the parking lot, and a Parking Space Monitoring Service, which detects the availability of individual parking spaces.
AI can detect areas of road that are closed off with cones and signage during maintenance in real time. This system can also send alert notifications to maintenance workers when it detects cars entering these areas without permission, thereby helping prevent the workers suffering accidents at the hand of external parties.
This system can be run with just a camera and edge computer. It can carry out monitoring automatically without any need to manually define the area that is closed off (Japanese Patent No. 7209785).

-
 Rtrilo pamphlet
(1,187KB)
Rtrilo pamphlet
(1,187KB)