Rtino is indoor autonomous mobile robot software capable of generating maps required for the autonomous movement of robots. It enables automated map generation functions and autonomous movement functions to be added to mobile carts and other vehicles operating in offices, plants, and other indoor floor spaces. Rtino can also be equipped to autonomous mobile robots responsible for environment measuring and monitoring, transportation, and cleaning.

Previously, autonomous mobile robots required the use of maps generated manually via remotely operated robots, and if obstacles appeared in the routes followed by these robots, the robots would suspend operations. Rtino solves such problems by linking automated map generation functions with autonomous movement functions.
- Autonomously generates without the need for human operation.
- Circumnavigates obstacles that appear on travel routes.
- Responds flexibly to changes in environments, for example by swiftly generating new maps when floor layouts change.
*Depending on the operating environment, the software may not be able to autonomously generate new maps. - Eliminates the need for dedicated rails and route guidelines.
■ Usage scenarios
Rtino provides mobile carts and other vehicles with automated map generation functions and autonomous mobility functions. It can be used in the following scenarios.
- Enables automated guided vehicles to avoid obstacles while moving autonomously on designated routes.
- Enables autonomous mobility robots to measure map environments with full autonomy through the establishment of measurement points on Rtino-generated maps.
- Enables autonomous mobility robots to be made responsible for some monitoring activities. Examples include automating regular monitoring work, and ensuring robots move to predesignated locations in times of emergency.
■ Tracking functions
Rtino-equipped vehicles are able to recognize and track target objects. Multiple Rtino-equipped vehicles can also be instructed to move in convoy.

Other Rtino applications include analyzing camera images to follow lines of a predesignated color. In contrast to previous line-tracing functions that required the use of magnetic tape, Rtino-equipped vehicles can, with the addition of affordable web cameras, be instructed to trace lines created with plastic tape or string. This function can be implemented at relatively low cost since it does not require the use of special sensors and maintenance costs associated with magnetic tape are therefore eliminated.


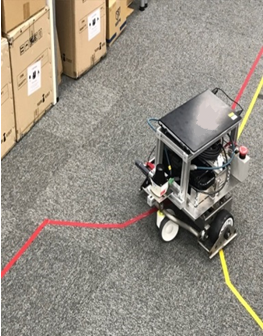
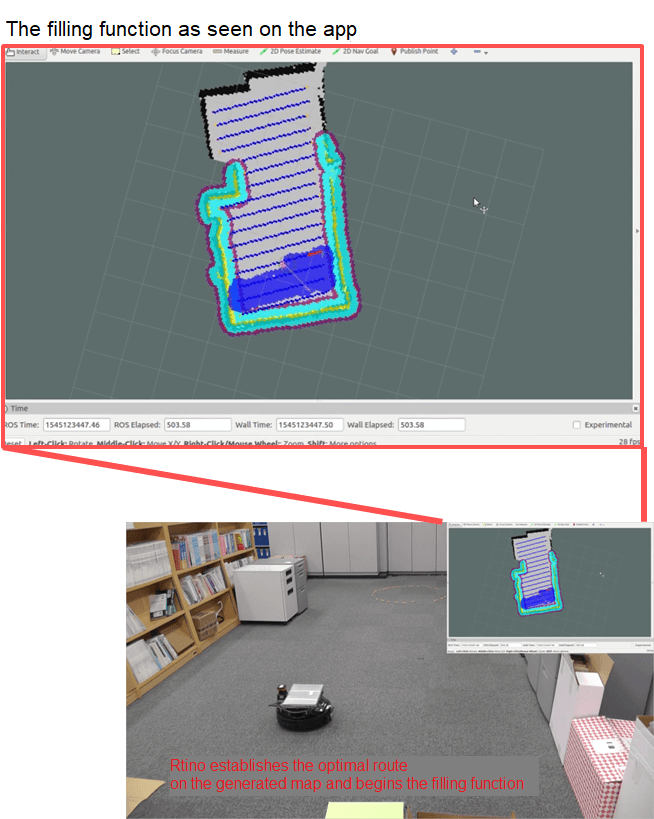
■ Filling functions
The Rtino filling function uses zig-zag patterns to move across the entirety of a designated space. This function can be used for cleaning or inspection work.
Rtino-equipped machines can leverage the software’s automated map generation functions to generate environment maps and perform filling functions in a continuous operation and with full automation. Rtino-equipped machines can also be instructed to autonomously circumnavigate any obstacles they encounter, continue on their original routes, and then fill any spaces that were not filled due to this circumnavigation at a later time.
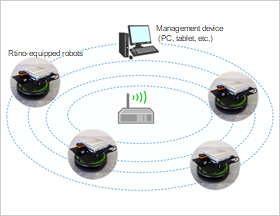
Rtino Manager is software that enables multiple Rtino-equipped autonomous robots to be centrally managed by PC. In addition to the collective monitoring and use of all Rtino-equipped robots operating within a fixed area, different instructions can also be given to individual Rtino-equipped robots.
■ Centralized management of multiple autonomous movement robot
Multiple Rtino-equipped robots can be automatically discovered within a single LAN area and registered for centralized management.
Registered Rtino-equipped robots can be provided with shared map data, so eliminating the need for individual robots to generate their own maps. Centralized management enables a number of different functions to be performed, such as designating destinations for each individual robot, or designating the same destination for multiple robots and instructing them to move there in turn.
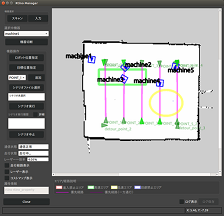
■ Establish priority routes and different movement patterns for different sections
Typically, autonomous movement robots travel along the shortest possible route with the greatest movement efficiency. However, establishing priority routes enables the robots to travel along different routes, while establishing no-entry areas and low-speed movement areas enables different robot movement patterns to be created for different sections.
■ Coordinating with higher-level systems
Robots can be controlled by using designated APIs to generate plug-in libraries, and by communicating and coordinating with existing production management, logistics, and other higher-level systems.
■ Flexible movement environments
Rtino Manager runs on PCs using Windows or Linux and requires no special hardware to operate.
-
 Rtino pamphlet
(1,198KB)
Rtino pamphlet
(1,198KB)