Aiming for safe and reliable robots, RTMSafety is the first robot middleware to achieve certification according to the IEC 61508 standard. It contributes to reducing costs and development time when creating highly-dependable and safe robots.

■ Background
With service robots coexisting with people and supporting their daily life activities, managing functional safety issues is vital for safety and peace-of-mind. It is expected that in the future, service robots that are not based on international standards for functional safety, such as IEC 61508 and ISO 13482, will not be feasible products. However, developing a robot with consideration for functional safety is both complex and difficult, leading to a state where robot products are prohibitively expensive to develop and purchase. For service robots to spread through the market, robot technology innovation is not sufficient. Reduced costs are also important.
Along with the increased development efficiency brought about by the componentisation of technology in robots equipped with RT-Middleware, RTMSafety allows robots to be equipped with features targeting functional safety. In doing so, it helps solve the aforementioned problems and realize a reduction in the cost of safe and reliable robots.
■ Outline of RTMSafety
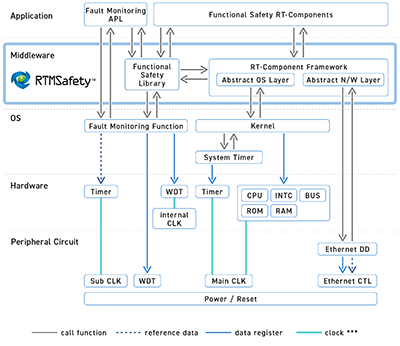
RTMSafety consists of two major libraries, shown in Figure 1. The first is a framework for the development of RT-Components for robotics. It abstracts operating system- and network-specific functionality allowing the developer to create RT-Components without concern for a particular platform or network technology. The second is provides additional safety by monitoring the liveliness of application software and utilising failure detection mechanisms provided by the operating system.
- 拡大
- Figure 1: The structure of RTMSafety.
■ Application example
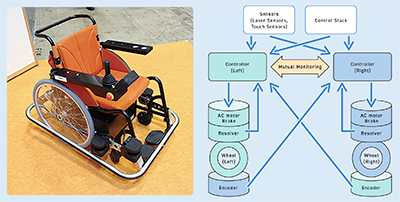
The National Institute of Advanced Industrial Science and Technology (AIST) has developed a dependable wheelchair robot based on SEC's RTMSafety. To achieve dependability, the wheelchair robot utilises two independent controller/motor units, one for each wheel. The two units continuously monitor themselves and each other for failures, allowing the robot to stop safely in the event of any failure.
- 拡大
- Figure 2: The dependable wheelchair robot developed at AIST. (Image: AIST)
■ System requirements
|
OS |
QNX Neutrino RTOS Safe Kernel 1.0 |
|---|
|
CPU |
X86, SH2, V850 |
|---|
-
 RTMSafety pamphlet
(517KB)
RTMSafety pamphlet
(517KB)
-
RTMSafety IEC 61508 Certificate
(138KB)