Rtrilo(アールトリロ)は、ディープラーニング技術や各種画像処理を組み合わせて、カメラからの動画・静止画より特定の物体や領域を抽出し、高度なロボットの制御を可能にするコンピュータビジョンソフトウェアです。ロボットはもちろん、自律移動台車など様々な機器に「眼」の機能を付与します。

コンピュータビジョンとは、動画や静止画から対象物を識別する、コンピュータによる視覚機能を実現する技術です。「Rtrilo」は、画像処理にディープラーニング技術を組み合わせることで、従来の画像処理では難しかった物体検出や物体特定を実現しています。さらに独自の画像処理を施すことで、様々なシーンに適用可能な状況認識機能を提供します。
■「Rtrilo」の適用シーン
「Rtrilo」をロボットや各種機器に搭載し、対象とする物体や障害物の検出、走行禁止領域や周辺状況の把握を可能とする"眼"の役割を搭載機器に付与することが、本製品のサービス内容です。以下のようなシーンでご利用いただけます。
【走行エリアと障害物の検出】
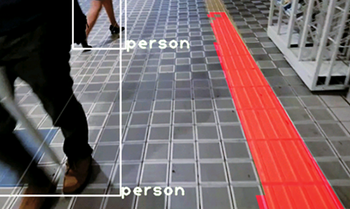
距離センサ等では識別が難しい走行禁止エリアや走行可能エリアをリアルタイムに検出しながら、ロボットを柔軟に自律移動させることができるようになります。
【特定の物体検出】
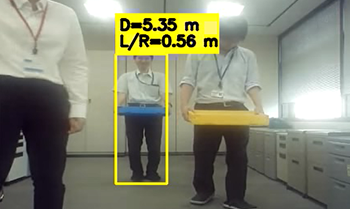
特定のケース(画像では青色のケース)を保持している人物や、特定の色・形の物体を、離れた場所から特定し、ロボットを移動させることができるようになります。
【把持対象の特定】

独自に学習させたディープラーニングモデルを組み込むことで、ロボットによる食器等の把持や、農業向けの雑草・穀物の識別等ができるようになります。
【7セグメント文字の読み取り】

様々な制約の中でIoT化が難しい従来機器のアラート情報(警告ランプ、7セグメントディスプレイ等)をカメラ画像から読み取り、管理者等へのリアルタイム通知が可能になります。
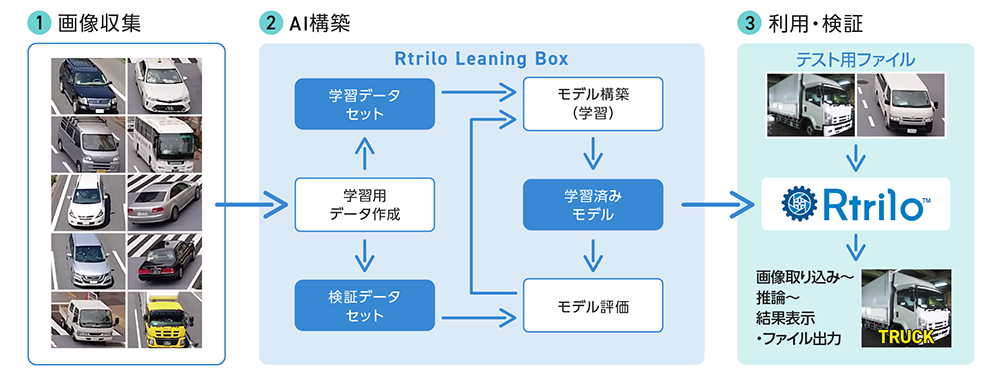
「Rtrilo」でディープラーニング技術を利用するためには、学習済みのディープラーニングモデルが必要になりますが、この学習済みモデルを構築するためのツールが「Rtrilo Learning Box」です。
特定の物体検出や画像分類を行うための学習済みモデルの構築には、複雑な前処理や、ディープラーニングモデルの定義、学習パラメータの調整、性能評価など、様々なプロセスが必要になります。これらモデル構築に必要な機能を搭載した「Rtrilo Learning Box」を利用することで、お客様自身で学習済みのディープラーニングモデルを容易に構築することができるようになります。
■構築可能なディープラーニングモデル
- 画像分類:画像が何を表しているのかを識別
- 物体検出:画像の中に写っている物体を検出し、それぞれが何を表しているかを識別
■前処理
- アノテーション(教師データ作成)
- データ分割(訓練/検証/テスト)
- 画像増幅(ノイズ、切り出し、色変換、ぼかし、コントラスト変更、反転、幾何学変換等)
■学習
- 設定ファイルにて、使用するモデル・不均衡補正・学習サイクル・学習時データ拡張等のパラメータを指定後、コマンドラインで学習プログラムを実行
- 損失関数や最適化アルゴリズム、学習率などの学習方法を自由に変更したり、独自のネットワークモデルを構築することも可能
■評価
- 学習曲線、各種指標(適合率、再現率、F値)、混同行列(Confusion Matrix)の出力
- 誤判定した画像の出力
「Rtrilo Parking Monitor」(アールトリロ パーキング モニター)は、カメラ画像にAIを活用した駐車場状況判断サービスです。「混雑状況判断」と「駐車区画監視」の2つのタイプのサービスを提供します。
道路メンテナンス作業において規制材を使って設定される規制領域を、AIでリアルタイムに特定します。さらに車両の侵入を同時に検出してメンテナンス作業員へアラート通知を行うことで、もらい事故を防ぐことができます。
カメラとエッジコンピュータのみで動作可能で、手動による領域等の設定を行うことなく、自動的にモニタリングすることができます。(特許第7209785)

-
 Rtrilo製品概要
(1,936KB)
Rtrilo製品概要
(1,936KB)