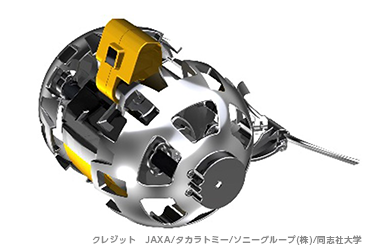
変形型月面ロボット(LEV-2) 愛称「SORA-Q(ソラキュー)」は国立研究開発法人宇宙航空研究開発機構(JAXA)、株式会社タカラトミー、ソニーグループ株式会社、同志社大学等が開発したロボットで、月面の重力環境下における超小型ロボットの探査技術の実証を目的としています。
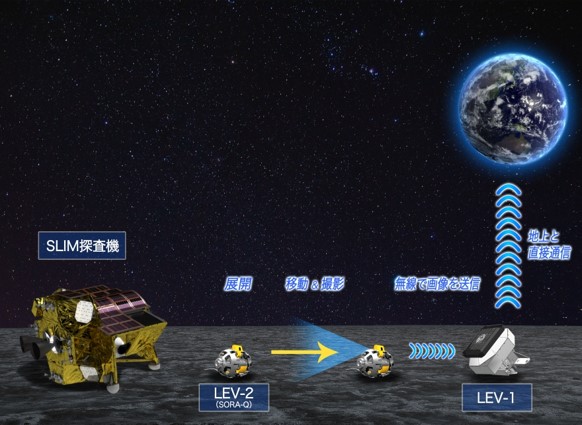
SORA-Q は小型月着陸実証機「SLIM(スリム)」に搭載されており、SLIM の月着陸直前にもう一台のロボット LEV-1 とともに放出されます。その後、月面を移動しながら、搭載されたカメラを利用して写真を撮影するとともに、走行時のデータを取得します。さらに、LEV-1 を経由して写真や走行データを地球へと送信します。
当社は、これら一連の動作を状況判断しながら自律的に行うソフトウェアの一部を開発しました。

- 拡大
- 変形型月面ロボット(LEV-2)愛称「SORA-Q」
クレジット JAXA/タカラトミー/ソニーグループ(株)/同志社大学
- 拡大
- SORA-Qのミッション
クレジット JAXA/タカラトミー/ソニーグループ(株)/同志社大学
2024年1月20日に、LEV-1とともにSLIM着陸直前に月面へ放出され、SLIMおよび周辺環境の撮影に成功しました。

- 拡大
- SORA-Qが撮影・送信した月面画像
クレジット JAXA/タカラトミー/ソニーグループ(株)/同志社大学