2025年2月25日
株式会社セック
株式会社セックは、技術研究組合産業用ロボット次世代基礎技術研究機構(ROBOCIP)の「産業用ロボットの機能向上・導入容易化のための産学連携による基礎技術研究」における「ハンドリング関連技術」および「遠隔制御技術」の開発を支援しました。
日本の人口減少に伴う労働力不足を解消するため、産業用ロボットの導入分野の拡大が求められています。特に、食品・化粧品・医薬品の三品産業や物流・サービス分野では、人手不足が深刻でありながら、少量生産や不定形物の取り扱いが必要なため、ロボットの導入が進んでいません。
「ハンドリング関連技術」は、これらの課題を解決するため、柔軟で汎用性のある新たなハンドリング技術の開発に取り組み、把持・搬送できる対象物を増やし、ロボットの適用範囲を拡大することを目指す研究開発です。当社は、「ハンドリング関連技術」の内、「圧力分布センサ情報とDBのワーク情報を活用したワーク把持」の開発を支援しました。
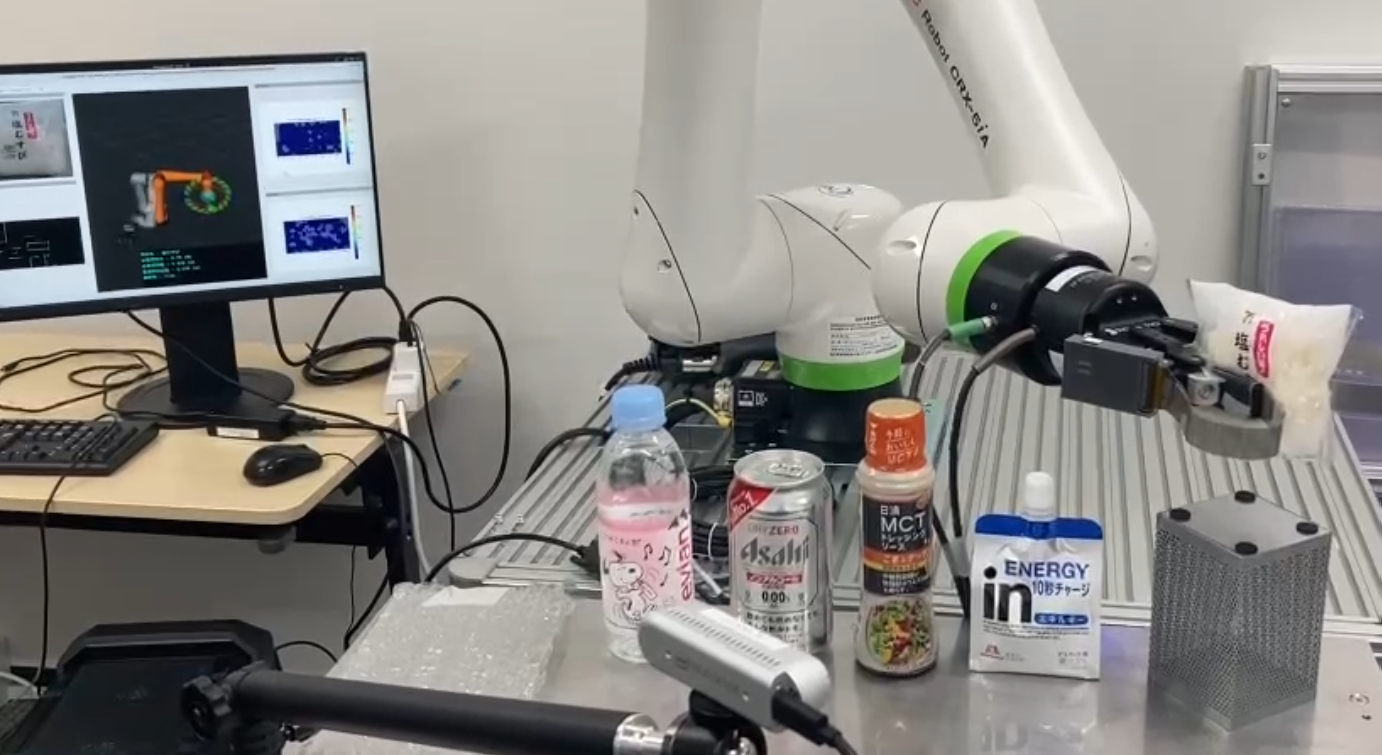
- 拡大
- ハンドリング関連技術デモンストレーションの様子(画像提供:ROBOCIP)
生産現場では、工場内外にあるロボットを、快適・自在に制御できる技術が求められています。従来、工場内でロボットの配置換えを行う際、ロボットを制御する有線通信回線の敷設変更作業のため、長時間にわたり稼働停止する必要がありました。また、労働人口の減少に伴う人手不足、特に熟練工不足に対応する必要がある中、遠隔制御によるロボットの集中操作が求められています。
「遠隔制御技術」は視覚、力覚、音声等を含む制御データに関し、通信遅延(ディレイ)や変動(ジッター)があっても安心安全に制御できるよう、5G通信等に対応した遠隔制御技術や遠隔操作支援技術の確立を目指す研究開発です。本技術を導入することで、従来有線通信回線で行っていたロボットの制御を、次世代無線通信技術等を活用して無線化することができ、ロボットの配置換えに伴う回線敷設作業を省略し、稼働停止時間を短縮することが可能となります。また、遠隔制御における安定的な操作を実現することができます。
当社は、本技術の「一般回線でも遠隔操作を可能とする通信制御とマルチモーダルインターフェース」の開発を支援しました。
本研究の成果は、技術研究組合産業用ロボット次世代基礎技術研究機構主催の研究成果報告会(2025年2月27日~28日)にて発表されます。詳細については、技術研究組合産業用ロボット次世代基礎技術研究機構のニュースリリースをご参照ください。
ROBOCIP研究成果報告会~人とロボットとの協働社会を目指して~開催のご案内
https://www.robocip.or.jp/2025.01.20 ROBOCIP研究成果報告会~人とロボットとの協働